Rappel : degré de liberté
Fondamental : Degré de liberté
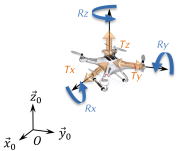
Dans un espace en 3 dimensions, il existe 6 mobilités ou degrés de liberté possibles pour un solide \(S\) par rapport à un repère de référence \(\mathcal R (O,\vec x_0, \vec y_0, \vec z_0)\) :
3 translations : \(T_x,T_y\) et \(T_z\)
3 rotations : \(R_x, R_y\) et \(R_z\)
Lorsque l'on met deux solides en contact, les surfaces alors en contact permettent de supprimer certains de ces degrés de liberté. Ainsi pour déterminer les mobilités d'un solide indéformable par rapport à un autre, il convient d'analyser la nature et la disposition des contacts entre les surfaces supposées géométriquement parfaites de ces deux solides.