Introduction
Les systèmes complexes pluritechnologiques étudiés en S.I.I. ont pour vocation d'agir sur une matière d’œuvre dans le but de lui apporter une valeur ajoutée.
Ils utilisent pour cela de l'énergie, disponible à la base sous différentes formes, ensuite convertie par les actionneurs en énergie mécanique puis adaptée et transmise aux effecteurs à qui revient la fonction d'agir sur la matière d’œuvre.
L'objet de ce chapitre est de modéliser la cinématique des mécanismes qui permettent d'adapter et de transmettre cette énergie mécanique au sein de ces systèmes.
Modéliser un mécanisme, c'est en proposer une représentation simplifiée selon un objectif bien précis. Ce travail de simplification s'avère nécessaire car les mécanismes étudiés sont composés d'un grand nombre de composants ayant des fonctions différentes telles que permettre l'assemblage du mécanisme, permettre sa lubrification, assurer son étanchéité, etc.
Dans le cadre de la modélisation cinématique, seuls les mouvements nous intéressent, indépendamment des causes qui leur ont donné naissance. Il s'agit donc de définir des modèles permettant de visualiser simplement les mouvements d'un mécanisme.
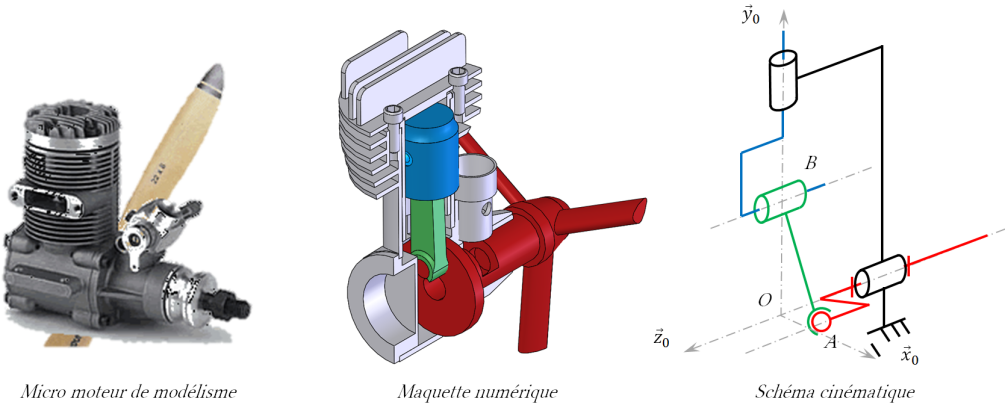
Les mécanismes étudiés sont présentés sous forme de dessins d'ensemble, de maquettes numériques ou directement disponibles sur systèmes réels du laboratoire dans le cadre des travaux pratiques. Pour mener à bien leur modélisation, il convient donc de prendre les hypothèses simplificatrices suivantes :
les solides qui constituent les mécanismes seront considérés indéformables ;
les surfaces qui constituent ces solides seront considérés comme géométriquement parfaites.
Le point de départ de toute modélisation cinématique est l'analyse des contacts entre les solides. Ainsi, avant d'être en mesure de modéliser un mécanisme complet, il faut être en mesure de modéliser le contact entre deux solides.