Position d'un point d'un solide dans un référentiel
Définition
La position d'un point \(M\) lié à un solide \(S\), à un instant \(t\), dans le repère de référence\(\mathcal{R}_0(O,\vec x_0, \vec y_0, \vec z_0)\) est définie à l'aide d'un vecteur appelé vecteur position :
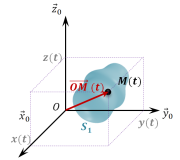
On utilise trois paramètres pour définir complètement la position du point \(M\) dans le repère de référence. Ceux-ci dépendent du système de coordonnées dans lequel est exprimé le vecteur position.
Dans le cas ci-dessus, le vecteur position est exprimé dans un système de coordonnées cartésiennes. les trois paramètres de position sont : \(x(t), y(t)\) et \(z(t)\).
On utilise aussi couramment les systèmes de coordonnées cylindriques et sphériques :

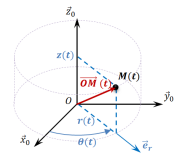
Coordonnées cylindriques :
Paramètres du mouvement : \(r(t), \theta(t)\) et \(z(t)\)
\(\boxed{ \quad \overrightarrow{OM}(t) = r(t) \, \vec e_r \, + \, z(t) \, \vec z_0 \quad}\)
Correspondance avec les coordonnées cartésiennes :
\(\left \{ \begin{array}{l} x(t)= r(t) \, \cos \theta(t)\\ y(t)= r(t) \, \sin \theta(t)\\ z(t) \end{array} \right .\)
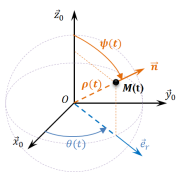
Coordonnées sphériques :
Paramètres du mouvement : \(\rho(t), \theta(t)\) et \(\psi(t)\)
\(\boxed{ \quad \overrightarrow{OM}(t) = \rho(t) \, \vec n \quad}\)
Correspondance avec les coordonnées cylindriques :
\(\left \{ \begin{array}{l} r(t)= \rho(t) \, \sin \psi(t)\\ \theta(t)\\ z(t)=\rho(t) \, \cos \psi(t) \end{array} \right .\)
Correspondance avec les coordonnées cartésiennes :
\(\left \{ \begin{array}{l} x(t)= \rho(t) \, \sin \psi(t) \, \cos \theta(t)\\ y(t)= \rho(t) \, \sin \psi(t) \, \sin \theta(t)\\ z(t)=\rho(t) \, \cos \psi(t) \end{array} \right .\)
Paramétrage d'un mouvement de translation rectiligne
Dans le cas de la translation rectiligne, un seul paramètre géométrique linéaire (variable) est nécessaire pour définir la position d'un solide à tout instant.
Exemple : Lame de scie sauteuse
Soit \(M\), un point d'un un solide \(S_1\) en translation rectiligne de direction \(\vec x_0\) par rapport au repère de référence \(\mathcal{R}_0\). Dans ce cas, x(t) est le seul paramètre nécessaire pour connaître la position du solide \(S_1\) à tout instant :
\(\quad \forall t \in \mathbb{R}^+, \, \overrightarrow{OM}(t)= x(t) \, \vec x_0 = {\vphantom{\left\{\begin{array}{ccc}a\\b\\c\\\end{array}\right\}}}_{(\vec x_0, \vec y_0, \vec z_0)}{ } \left | \begin{array}{c}x(t) \\0 \\0 \end{array} \right .\quad\)
Paramétrage d'un mouvement de rotation autour d'un axe fixe
Lorsqu'un solide a un mouvement de rotation, un seul paramètre géométrique angulaire est nécessaire pour définir sa position à tout instant.
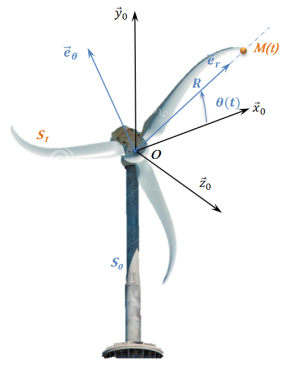
Exemple : Pales d'éolienne
Soit \(M\), un point d'un un solide \(S_1\) en rotation autour de l'axe fixe\((0,\vec z_0)\) par rapport à au repère de référence \(\mathcal{R}_0\). La distance de ce point à l'axe, ou rayon \(R\), reste constante au cours du mouvement.
Dans ce cas, \(\theta(t)\) est le seul paramètre nécessaire à la définition de la position du solide \(S_1\) :
\(\quad \forall t \in \mathbb{R}^+, \, \overrightarrow{OM}(t)= R \, \vec e_r(t) ={\vphantom{\left\{\begin{array}{ccc}a\\b\\c\\\end{array}\right\}}}_{(\vec e_r, \vec e_\theta, \vec e_z)}{ } \left | \begin{array}{c}R \\0 \\0 \end{array} \right .\)
Remarque :
La paramètre \(\theta\) n’apparaît pas explicitement dans l'expression du vecteur position. Celui-ci est présent à travers le vecteur \(\vec e_r\), dont l'orientation dépend directement de cet angle.
En fait \(\theta\) positionne la base cylindrique \((\vec e_r, \vec e_\theta, \vec e_z)\) en rotation par rapport à la base cartésienne \((\vec x_0, \vec y_0, \vec z_0)\).
On peut alors chercher à exprimer le vecteur position dans la base cartésienne en fonction du paramètre \(\theta\). Cela fait appel aux notions de changement de base.