Lois de mouvement - Lois horaires
Mouvement de translation rectiligne
Dans le cas d'un solide \(S\) en mouvement de translation rectiligne de direction \(\vec x_0\) dans le référentiel de référence \(\mathcal{R}_0(O,\vec x_0, \vec y_0, \vec z_0)\) , un seul paramètre \(x(t)\) suffit à connaître la position d'un point \(M\) lié à \(S\) à tout instant :
\(\left \{ \begin{array}{l} \overrightarrow{OM}(t) = x(t)\, \vec x_0\\ \overrightarrow{V_{M \in S /\mathcal R_0} }(t) = x'(t) \, \vec x_0\\ \overrightarrow{\Gamma_{M \in S /\mathcal R_0} }(t) = x''(t) \, \vec x_0 \quad\textit{, par définition du vecteur accélération.}\end{array} \right .\)
Dans le cas d'un accélération constante, \(x''(t)=cte=a_0\) , on peut déterminer par intégration la vitesse et la position du point \(M\) et établir les lois horaires du mouvement :
Remarque :
\(v_0\) et \(x_0\) représentent respectivement la vitesse et la position initiales du point M, soit à l'instant à t=0 s.
Si \(a_0=cte \neq 0 \,m/s^2\), on parle de mouvement de translation rectiligne uniformément varié (accéléré ou décéléré).
Si \(a_0= 0 \,m/s^2\), on parle de mouvement de translation rectiligne uniforme.

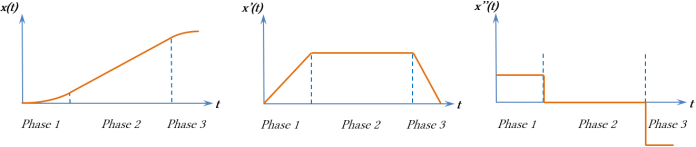
Les lois horaires permettent l'étude de la translation d'un solide dans le cadre d'une loi de vitesse en trapèze cumulant :
Phase 1 : mouvement de translation rectiligne uniformément accéléré.
Phase 2 : mouvement de translation rectiligne uniforme.
Phase 3 : mouvement de translation rectiligne uniformément décéléré.
L'étude d'un mouvement commençant à \(t=t_i>0\) (cas des phases 2 et 3 par exemple) nécessite un changement de variable dans les équations horaires. Les équations horaires deviennent :
où \({v_i}_0\) et \({x_i}_0\) représentent respectivement la vitesse et la position initiales du point \(M\) pour la phase étudiée, soit à l'instant à \(t=t_i\).
Mouvement de rotation autour d'un axe fixe
Dans le cas d'un solide S en mouvement de rotation autour d'un axe fixe \((O_0,\vec z_0)\) par rapport au référentiel de référence \(\mathcal{R}_0(O,\vec x_0, \vec y_0, \vec z_0)\), on rappelle :
Ainsi, un seul paramètre \(\theta(t)\) (et ses dérivées) suffit à connaître les position, vitesses et accélération d'un point M lié à S à tout instant. Par analogie avec le mouvement rectiligne, on peut établir les équations horaires du mouvement :
Remarque :
\(\theta'_{i0}\) et \(\theta_{i0}\) représentent respectivement la vitesse angulaire et la position angulaire initiales du point M pour la phase étudiée, soit à l'instant à \(t=t_i\). \(\theta''(t)\) représente l'accélération angulaire en \(rad/s^2\).
On note souvent \(\theta' (t)= \omega(t)\) pour la vitesse angulaire. Ainsi, \(\theta''(t) =\omega'(t)\) , \(\theta''_{i0} = \omega'_{i0}\) et \(\theta'_{i0} = \omega_{i0}\).
Si \(\theta''_{i0} = \omega'_{i0}=cte \neq 0 \, rad/s^2\), on parle de mouvement de rotation uniformément varié (accéléré ou décéléré).
Si \(\theta''_{i0} = \omega'_{i0}= 0 \, rad/s^2\), on parle de mouvement de rotation uniforme.
Tout comme dans le cas du mouvement de translation, ces équations permettent l'étude des mouvement avec une loi de vitesse (angulaire) dite en trapèze.