Equiprojectivité
Théorème
Soient deux points \(A\) et \(B\) appartenant à un même solide \(S_1\) en mouvement plan par rapport à un solide de référence \(S_0\) auquel on associe le repère \(\mathcal{R}_0(O_0, \vec x_0, \vec y_0, \vec z_0)\).
Soient \(\overrightarrow{V_{A\in S_1/S_0}}\) et \(\overrightarrow{V_{B\in S_1/S_0}}\) les vecteurs vitesse respectifs de ces points dans le mouvement de \(S_1\) par rapport à \(S_0\).
La projection orthogonale de \(\overrightarrow{V_{A\in S_1/S_0}}\) sur \((AB)\) est égale à la projection orthogonale de \(\overrightarrow{V_{B\in S_1/S_0}}\) sur \((AB)\).
Complément : Démonstration
D'après le champ des vecteurs vitesse :
\(\begin{eqnarray*} \overrightarrow{V_{A\in S_1/S_0}}\, . \, \overrightarrow{AB} & = & \left( \overrightarrow{V_{B\in S_1/S_0}} +\overrightarrow{AB} \wedge \overrightarrow{\Omega(S_1/S_0)} \right) \, . \, \overrightarrow{AB}\\ & = &\overrightarrow{V_{B\in S_1/S_0}} \, . \, \overrightarrow{AB} \, + \, \left(\overrightarrow{AB} \wedge \overrightarrow{\Omega(S_1/S_0)} \right) \, . \, \overrightarrow{AB} \\ & = &\overrightarrow{V_{B\in S_1/S_0}} \, . \, \overrightarrow{AB} \, + \, \underbrace{\left(\overrightarrow{AB} \wedge \overrightarrow{AB}\right)}_{=\vec 0} \, . \, \overrightarrow{\Omega(S_1/S_0)} \quad\textit{(cf. propriétés du produit mixte)}\\ &=&\overrightarrow{V_{B\in S_1/S_0}} \, . \, \overrightarrow{AB}\end{eqnarray*}\)

Application graphique
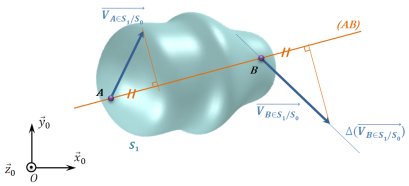
Méthode : Equiprojectivité
Connaissant :
le vecteur vitesse en un point \(A\) de \(S_1\) en mouvement plan sur plan par rapport à \(S_0\) : \(\overrightarrow{V_{A\in S_1/S_0}}\),
le support du vecteur vitesse en autre point B : \(\Delta \left( \overrightarrow{V_{B\in S_1/S_0}} \right)\),
on peut construire graphiquement le vecteur vitesse du point B :
On trace la droite \((AB)\).
On construit la projection de \(\overrightarrow{V_{A\in S_1/S_0}}\) sur \((AB)\).
On reporte cette projection au point B, du même coté du point.
On en déduit \(\overrightarrow{V_{B\in S_1/S_0}}\) car \(\overrightarrow{V_{B\in S_1/S_0}}\, . \, \overrightarrow{AB}=\overrightarrow{V_{A\in S_1/S_0}} \, . \, \overrightarrow{AB}\)
(\(\overrightarrow{V_{B\in S_1/S_0}}\) a la même projection sur \((AB)\) que \(\overrightarrow{V_{A\in S_1/S_0}}\)).

Méthode : Double équiprojectivité
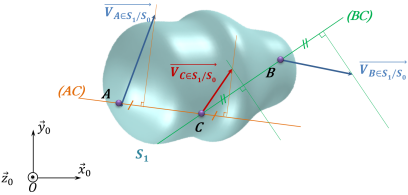
Connaissant :
le vecteur vitesse en un point \(A\) de \(S_1\) en mouvement plan sur plan par rapport à \(S_0\) : \(\overrightarrow{V_{A\in S_1/S_0}}\),
le vecteur vitesse en un autre point \(B\) de \(S_1\) par rapport à \(S_0\) : \(\overrightarrow{V_{B\in S_1/S_0}}\),
on peut construire graphiquement le vecteur vitesse de n'importe quel autre point \(C\) du solide \(S_1/S_0\) :
On trace les droites \((AC)\) et \((BC)\).
On applique deux fois l'équiprojectivité telle que décrite au paragraphe précédent :
\(\overrightarrow{V_{C\in S_1/S_0}}\, . \, \overrightarrow{AC}=\overrightarrow{V_{A\in S_1/S_0}} \, . \, \overrightarrow{AC}\) et \(\overrightarrow{V_{C\in S_1/S_0}}\, . \, \overrightarrow{BC}=\overrightarrow{V_{B\in S_1/S_0}} \, . \, \overrightarrow{BC}\)
On en déduit \(\overrightarrow{V_{C\in S_1/S_0}}\)