Définition du mouvement plan
Définition : Mouvement plan sur plan
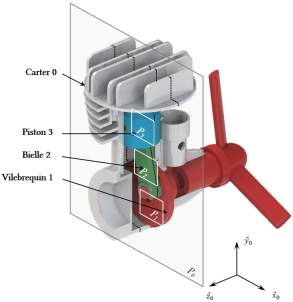
Le mouvement d'un solide \(S_1\) par rapport à un solide \(S_0\) est dit « plan sur plan », s'il existe un plan \(\mathcal{P}_1\) lié au solide \(S_1\) qui reste constamment confondu avec un plan \(\mathcal{P}_0\) lié au solide \(S_0\).
Conséquences :
Soit un solide \(S_1\) auquel on associe le repère \(\mathcal{R}_1(O_1, \vec x_1, \vec y_1, \vec z_1)\) en mouvement plan sur plan de normale \(\vec z_1=\vec z_0\) par rapport à un solide \(S_0\) auquel on associe le repère \(\mathcal{R}_0(O_0, \vec x_0, \vec y_0, \vec z_0)\).
La trajectoire d'un point \(M\) quelconque lié à \(S_1\) dans son mouvement par rapport à \(S_0\) est contenue dans un plan perpendiculaire à \(\vec z_0\)
Le torseur cinématique de \(S_1\) par rapport à \(S_0\) en un point \(M\) quelconque est de la forme :
\(\overrightarrow{\Omega(S_1/S_0)}\) reste à tout instant colinéaire à \(\vec z_0\) (ou perpendiculaire au plan \((O_0, \vec x_0, \vec y_0)\)).
Quelque soit le point \(M\) lié à \(S_1\), \(\overrightarrow{V_{M\in S_1/S_0}}\) reste perpendiculaire à \(\vec z_0\) (ou parallèle au plan \((O_0, \vec x_0, \vec y_0)\)).