Identification d'un premier ordre
La fonction de transfert d'un tel système est : \(H(p) =\frac K {1+\tau.p}\) où \(K\) et \(\tau\) sont à déterminer.
L'expression mathématique de la réponse à un échelon d'amplitude \(E_0\) est : \(s(t)=K.E_0.\left(1-\text{e}^{-\frac t \tau}\right) .u(t)\)
Le gain statique K peut être déterminé en relevant la valeur finale : \(\boxed{K = \frac {s(\infty)} {E_0}}\)
La constante de temps τ peut être déterminée de plusieurs manières :
En relevant le temps mis pour atteindre \(0,63.K.E_0\) car \(s(\tau) \approx 0,63.s(\infty)\).
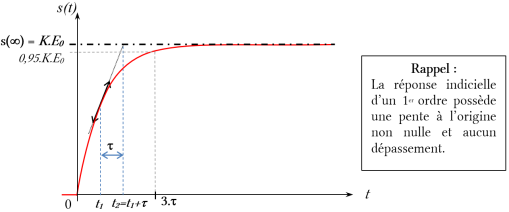
En relevant le temps mis pour atteindre \(0,95.K.E_0\) (et en le divisant par 3) car \(t_{5\%} = 3.\tau\)
En relevant directement le temps (\(t=\tau\)) correspondant à l'intersection entre la tangente à l'origine et l'asymptote finale.
À partir d'une tangente quelconque à la courbe (cf. tracé ci-dessus) : la tangente à la courbe à une date quelconque \(t_1\) coupe l'asymptote finale en \(t_2\) , avec\(t_2 – t_1 = \tau\). Cette méthode est très pratique pour relever \(\tau\) lorsque le début de la courbe n'est pas net.
Une fois les caractéristiques déterminées, il convient de tracer la réponse théorique et de la comparer à la courbe expérimentale afin de valider le modèle choisi.
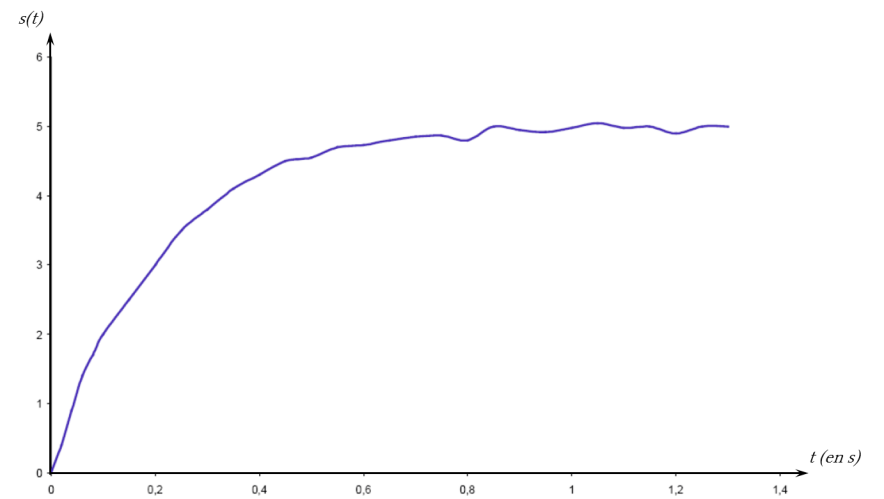
Exemple : Réponse indicielle d'un système du premier ordre
Déterminer les caractéristiques de la fonction de transfert du système suivant, dont la réponse expérimentale à une entrée en échelon d'amplitude 2,5 \(u_{SI}\) est donnée ci-après :
Vous utiliserez les 4 méthodes différentes pour déterminer \(\tau\).