Roulement sans glissement
Fondamental : Condition de roulement sans glissement
Soient deux solides \(S_2\) et \(S_1\) en contact ponctuel au point \(I\). On considère que si un solide \(S_2\) roule sans glisser sur un solide \(S_1\) au point \(I\), alors :
Exemple : Roues de friction
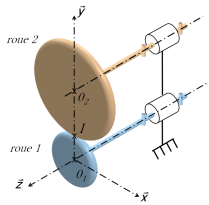
Soient deux roues de friction 1 et 2 en liaisons pivots par rapport au bâti 0 d'axes respectifs \((O_1,\vec z)\) et \((O_2,\vec z)\) et de rayons respectifs \(r_1\) et \(r_2\).
On suppose que les roues sont en contact ponctuel en un point I et qu'elles roulent sans glisser l'une par rapport à l'autre.
La condition de roulement sans glissement entre 1 et 2 en I s'écrit :
\(\overrightarrow{V_{I \in 2/1}}= \vec 0\)

Complément : Application au calcul du rapport de réduction
L'expression de la condition de roulement sans glissement entre les deux roues de friction constitue le point de départ de la démonstration permettant de retrouver le rapport entre les vitesses de rotation des deux roues (ou rapport de réduction).
En projetant sur l'axe \(\vec x\) , il vient la relation : \(\boxed{ \;\frac {\omega_{20} }{\omega_{10} } = - \frac {r_1 }{r_2 } \;}\)