Transmettre la puissance mécanique (sans adaptation ni transformation de mouvement)
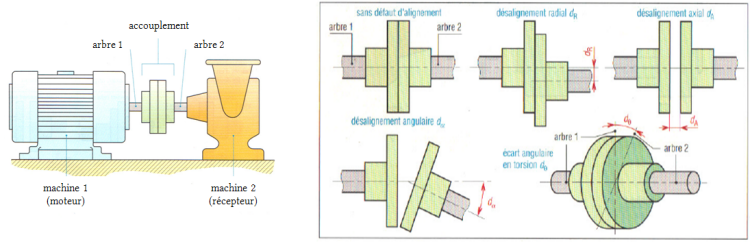
Les accouplements (ou joints) mécaniques
Leur fonction est de transmettre d'un arbre moteur vers un arbre récepteur une puissance donnée, malgré les défauts de coaxialité qui peuvent exister entre ces deux arbres.

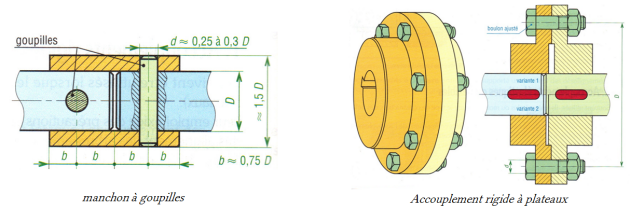
Les accouplements rigides
Un premier type de solution consiste à créer un encastrement rigide entre les arbres, sans aucune compensation de défaut d'alignement. Ce type d'accouplement nécessite une grande précision de positionnement des arbres mais est très économique.

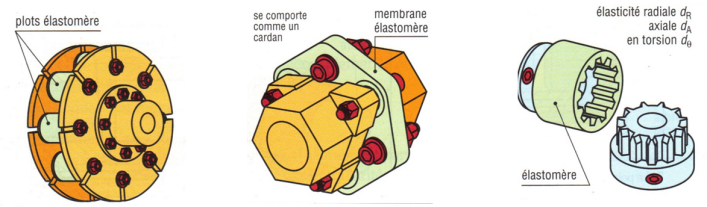
Les accouplements élastiques
Une autre solution consiste à interposer une pièce déformable entre deux flasques liés aux deux arbres. Suivant le type de défauts à compenser, il existe toute une variété d'accouplements standards.
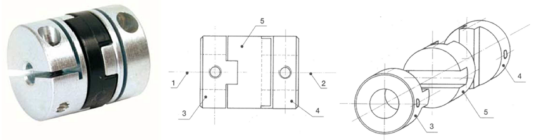
Joint de Oldham
Il supporte uniquement des désalignements radiaux et permet donc la transmission entre deux arbres parallèles présentant un léger décalage.
Les accouplements entre arbres sécants
Les accouplements élastiques supportent des défauts angulaires de l'ordre de 3° environ. Pour des désalignements supérieurs, il faut utiliser les joints de Cardan et assimilés (tripode, etc).
Ce type de joint d'accouplement trouve son utilité dans la propulsion marine (accouplement arbre moteur, arbre d'hélice), l'automobile (arbre de sortie du différentiel, arbre de roue motrice), les machines agricoles (prise de force, arbre d'entrée de diverses machines), etc.
Le joint d'accouplement est dit homocinétique, lorsqu'au cours du temps la vitesse de rotation de sortie reste à tout instant égale à la vitesse de rotation d'entrée.
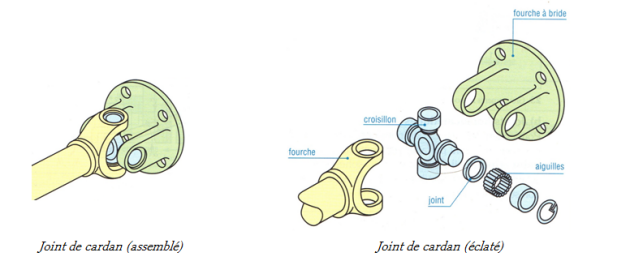
Joint de Cardan
Le mouvement se transmet par l'intermédiaire d'un croisillon libre en rotation par rapport aux arbres d'entrée et de sortie.
Inconvénient : c'est un joint non homocinétique. Bien que le nombre de tours parcouru par les deux arbres soit le même, la vitesse de rotation de l'arbre de sortie n'est pas égale à chaque instant à celle de l'arbre d'entrée. Au cours d'un même tour, l’arbre de sortie prend successivement de l'avance puis du retard par rapport à l'arbre d'entrée pour finir tous les deux sur le même "ligne".
Ce phénomène est générateur de vibrations importantes d'autant plus élevées que l'angle de brisure et la vitesse d'entrée sont grands.
Correction : l'utilisation de deux joints de cardan en série avec trois arbres dont les angles de brisures \(\alpha\) sont identiques permet de corriger le défaut d'homocinéticité entre les arbres d'entrée et de sortie. Les fluctuations entre l'arbre d'entrée et l'arbre intermédiaire sont compensées par celles entre l'arbre intermédiaire et l'arbre de sortie.

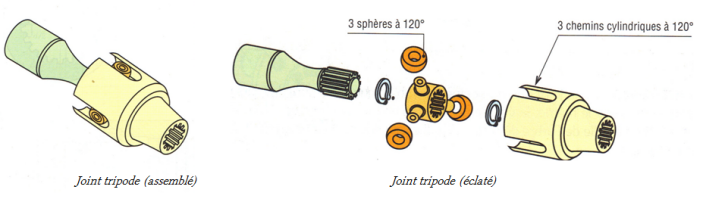
Joint tripode
Le joint tripode réalise la même fonction qu'un joint de Cardan mais possède une technologie différente : il est basé sur trois sphères articulées réparties à 120° pouvant coulisser dans trois cylindres coaxiaux parallèles à l'un des arbres.
Ce joint est homocinétique par construction.
Les accouplements temporaires
L'accouplement est dit temporaire lorsque les deux arbres peuvent être désolidarisés, éventuellement sous l'action d'une commande extérieure (humaine ou automatisée).
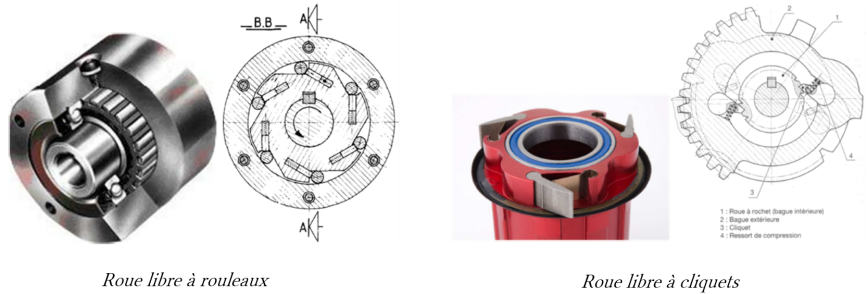
Les roues libres
Une roue libre permet de transmettre la puissance entre deux arbres, mais uniquement pour un sens de rotation. C'est une transmission unidirectionnelle qui ne nécessite pas de commande extérieure.
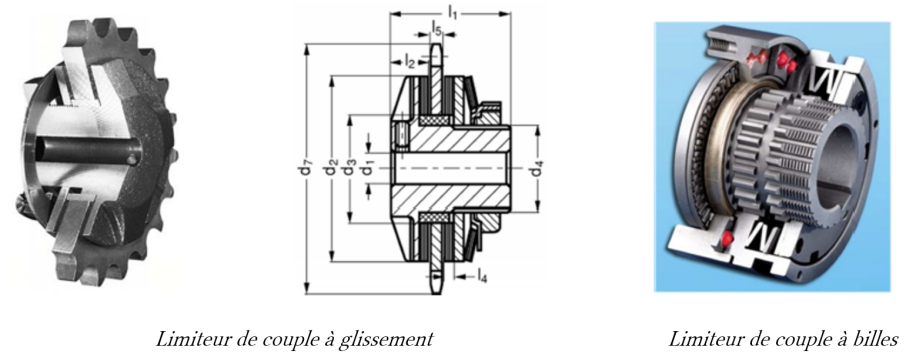
Les limiteurs de couple
Ce sont des organes de sécurité. Ils permettent en cas de couple trop importants de désolidariser l'arbre d'entrée et l'arbre de sortie en provoquant un glissement entre des surfaces de friction solidaires de chacun de ces deux arbres. Le couple transmissible est généralement réglable (exemple : clé dynamométrique).
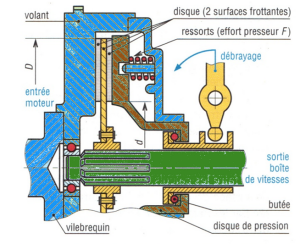
Les embrayages
L'embrayage est un mécanisme qui permet d'accoupler ou de désaccoupler, progressivement ou non, les arbres associés au moteur et au récepteur suite à la commande d'un opérateur.
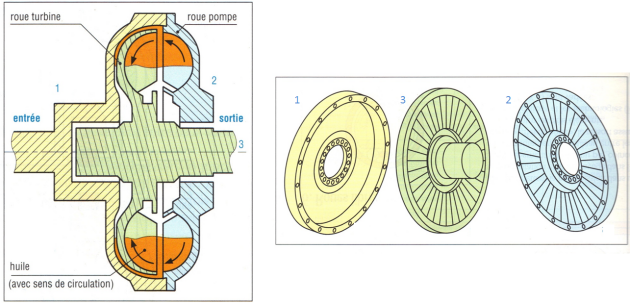
Les coupleurs hydrodynamiques
La transmission de la puissance de l'arbre moteur vers l'arbre récepteur peut se faire par couplage hydraulique. La roue à aubes « pompe » \(2\) solidaire de l'entrée \(1\) transmet la puissance mécanique de rotation à la roue à aubes « turbine » \(3\) par l’intermédiaire d'un fluide hydraulique. Il n'y a pas de liaison mécanique (contact) entre l'arbre d'entrée et l'arbre de sortie. Le coupleur filtre en partie les phénomènes vibratoires.
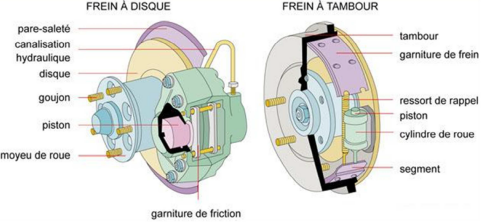
Les freins
Dans le cas des freins, la fonction est le plus souvent de ralentir ou d'arrêter l'arbre en mouvement de rotation selon un ordre de commande. Beaucoup de systèmes de freinage existent. Les plus courants sont les freins à tambours et les freins à disques.