Produit vectoriel
Définition
Définition : Produit vectoriel
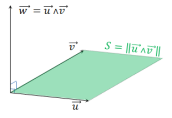
Contrairement au produit scalaire, le produit vectoriel \(\vec u \wedge \vec v\)a pour résultat un vecteur \(\vec w\) tel que :
direction : \(\vec w\) est orthogonal au plan formé par \(\vec u\) et \(\vec v\) ;
sens : le trièdre \((\vec u, \vec v, \vec w)\) est direct ;
norme : \(\boxed{\Vert \, \vec w \, \Vert = \Vert \, \vec u \, \wedge \vec v \, \Vert = \Vert \, \vec u \, \Vert \times \Vert \, \vec v \, \Vert \times \vert \sin(\widehat{\vec u , \vec v}) \vert}\).
Remarque : Produit vectoriel à partir des composantes
Il est également possible de calculer un produit vectoriel à partir des composantes des deux vecteurs à condition que ceux-ci soient exprimés dans une même base :
Soient \(\vec u= {\vphantom{\left\{\begin{array}{ccc}a\\b\\c\\\end{array}\right\}}}_{(\vec x, \vec y, \vec z)}{ } \left | \begin{array}{c}u_x \\ u_y\\ u_z\end{array} \right . \text{ et } \vec v= {\vphantom{\left\{\begin{array}{ccc}a\\b\\c\\\end{array}\right\}}}_{(\vec x, \vec y, \vec z)}{ } \left | \begin{array}{c}v_x \\ v_y\\ v_z\end{array} \right . \Rightarrow \boxed{\vec u \wedge \vec v = {\vphantom{\left\{\begin{array}{ccc}a\\b\\c\\\end{array}\right\}}}_{(\vec x, \vec y, \vec z)}{ } \left | \begin{array}{c}u_x \\ u_y\\ u_z\end{array} \right . \wedge {\vphantom{\left\{\begin{array}{ccc}a\\b\\c\\\end{array}\right\}}}_{(\vec x, \vec y, \vec z)}{ } \left | \begin{array}{c}v_x \\ v_y\\ v_z\end{array} \right . = {\vphantom{\left\{\begin{array}{ccc}a\\b\\c\\\end{array}\right\}}}_{(\vec x, \vec y, \vec z)}{ } \left | \begin{array}{c}u_y \times v_z - u_z \times v_y\\ v_x \times u_z-u_x \times v_z\\ u_x \times v_y-u_y \times v_x\end{array} \right .}\)

Fondamental : Méthode pratique de calcul de produits vectoriels
En pratique, on calculera souvent le résultat d'un produit vectoriel à l'aide de la formule suivante :
le signe est donné par la règle du tire-bouchon ou des 3 trois doigts de la main droite ;
le vecteur \(\vec n\) est unitaire (\(\Vert \, \vec n \, \Vert=1\)) et correspond au vecteur normal au plan formé par les vecteur \(\vec u\) et \(\vec v\) ;
la norme \(\Vert \, \vec u \wedge \vec v \, \Vert\) se calcule en utilisant la définition du produit vectoriel.
Application :
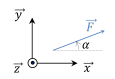
\(\vec F \wedge \vec x = - \, \Vert \, \vec F \wedge \vec x \, \Vert \, \vec z \, = \, - \Vert \, \vec F \, \Vert \times \Vert \, \vec x \, \Vert \times | sin(-\alpha)| \, \vec z \,= \,- F \, sin(\alpha) \, \vec z\)
\(\vec F \wedge \vec y = + \, \Vert \, \vec F \wedge \vec y \, \Vert \, \vec z \; = \, + \, \Vert \, \vec F \, \Vert \times \Vert \, \vec y \, \Vert \times |sin(\frac \pi 2 -\alpha)| \, \vec z \, = \, F \, cos(\alpha) \, \vec z\)
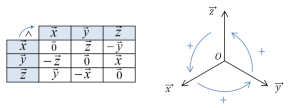
Fondamental : Produits vectoriels entre vecteurs d'une même base
Soit \((O,\vec x, \vec y, \vec z)\) un repère orthonormé direct. Le tableau ci-dessous récapitule le résultat des différents produits vectoriels entre deux vecteurs de la même base. Attention toutefois au sens de lecture de ce tableau.
Propriétés
Antisymétrie : \(\vec u \wedge \vec v = - \vec v \wedge \vec u\)
Distributivité : \(\vec u \wedge (\vec v +\vec w) = \vec u \wedge \vec v + \vec u \wedge \vec w\)
Multiplication :\( \forall (\lambda, \mu) \in \mathbb{R}^2, \lambda \vec u \wedge \mu \vec v =\lambda \mu \, \, \vec u \wedge \vec v\)
Cas de nullité : \(\boxed{\vec u \wedge \vec v = \vec 0 \quad \Leftrightarrow \quad\left \{\begin{array}{l}\quad \quad \vec u = \vec 0 \\\text{ou} \quad \vec v = \vec 0 \\\text{ou} \quad \vec u \text{ et }\vec v \text{ colinéaires}\end{array}\right .}\)
Double produit vectoriel : formule de Gibbs
Définition : Formule de Gibbs
Pour calculer un double produit vectoriel, on peut utiliser la formule de Gibbs :
En pratique, dans un problème de mécanique, il est souvent plus simple d'effectuer les deux produits vectoriels successifs, en commençant par \(\vec v \wedge \vec w\). Cette formule reste cependant très utile pour mener à bien certaines démonstrations de théorèmes utilisés en mécanique du solide.