Notion de base
Définition : Base
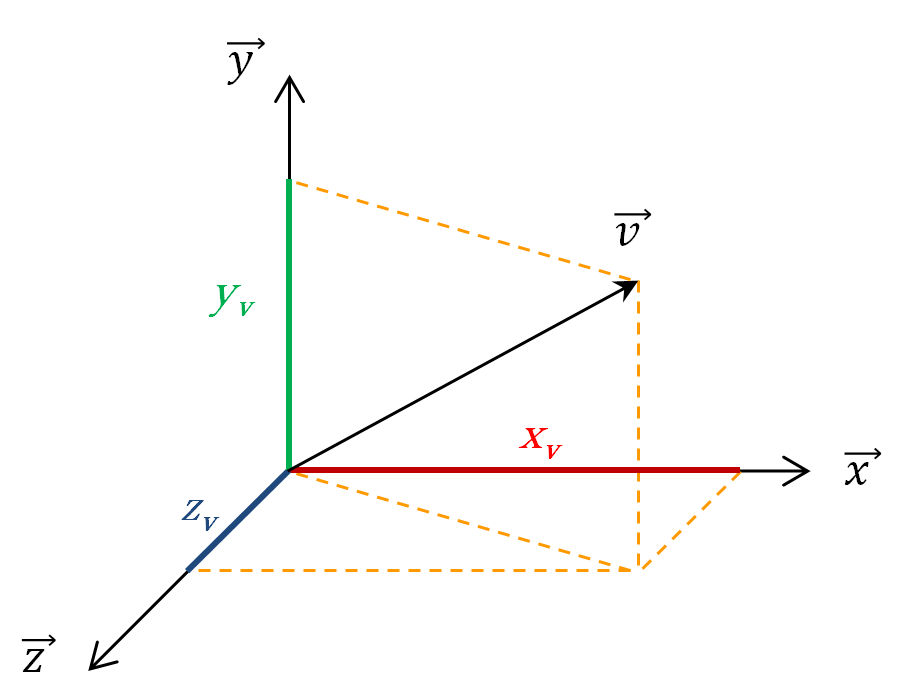
Dans un espace (E) de dimension 3, une base est constituée de 3 vecteurs \(\vec x, \,\vec y\) et \(\vec z\) qui permettent de définir de façon unique un vecteur \(\vec v\) quelconque :
\(\boxed{\; \vec v \; = \; x_v \, \vec x + y_v \, \vec y + z_v \, \vec z \; = {\vphantom{\left\{\begin{array}{ccc}a\\b\\c\\\end{array}\right\}}}_{(\vec x, \vec y, \vec z)}{ } \left | \begin{array}{c}x_v \\y_v \\z_v\end{array} \right . }\)
Remarque :
\(x_v, y_v\) et \(z_v\) sont les composantes scalaires du vecteur \(\vec v\) dans la base \((\vec x, \vec y, \vec z)\).